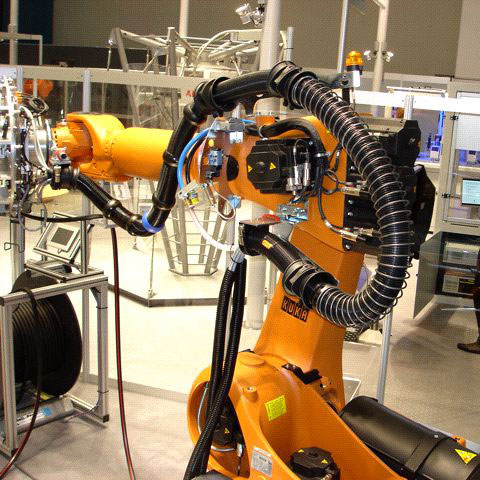
REIKU offers a multitude of spring retraction components in order to control the location of the conduit. In high dynamic Robotics applications it is imperative that the conduit be long enough to service all of the Robots’ moves, having a REIKU spring retraction system will keep the service loop of conduit in a safe area behind the Robot when not required.
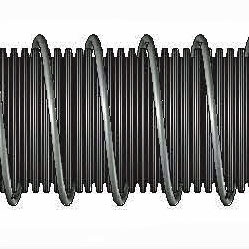
All of the REIKU Spring Holders act like a “halo” allowing the conduit to pass through them as the conduit moves back and forth to service the movements of the Robot. At the rear of the Spring Holders there is a groove where the spring is attached and then a PAPRB style of REIKU Protector is attached to the conduit behind the spring. When the Robot extends to positions that require more conduit, it pulls the conduit from a “safe area” behind the Robot. When the conduit is pulled the Protector which is locked onto the corrugations of the conduit engages on the rear of the spring creating a load and once the Robot returns to a position where this additional length of conduit is not required the conduit returns back to the rear of the Robot.